Produkt




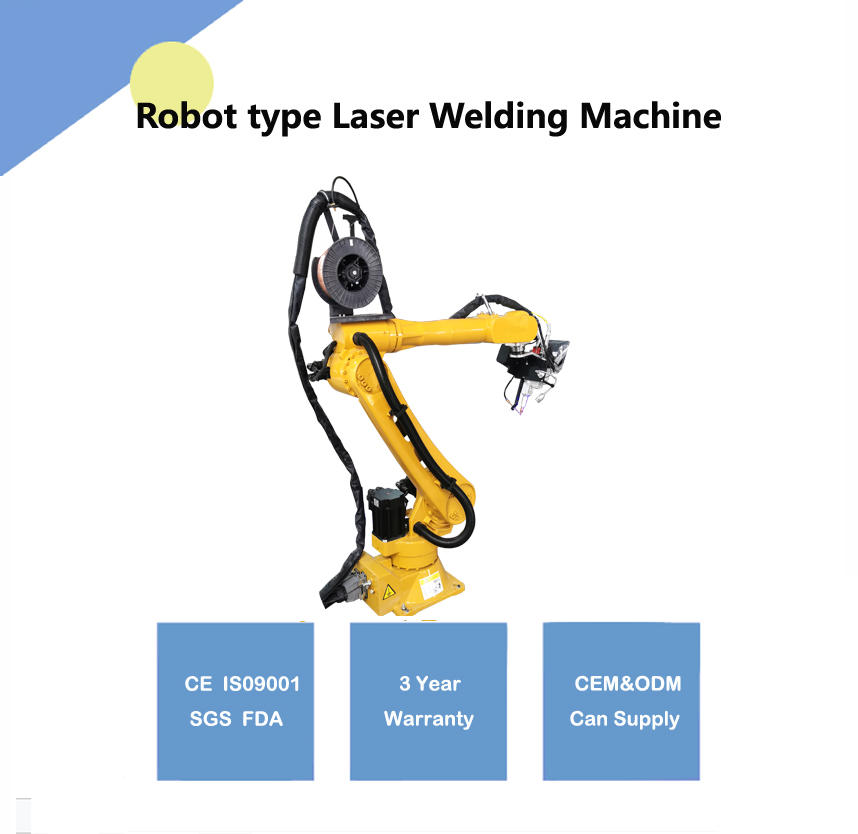
Laser-Schweissmaschinn vum Robotertyp
Produkt Display
Technesche Parameter
| Sechs-Achs Roboter | Tuling | Kärkomponenten | Laserquell |
| Benotzung | Schweessmetall | Maximal Ausgangsleistung | 2000W |
| Uwendbar Material | Metall | CNC oder net | Jo |
| Ofkillmodus | Waasserkillung | Elektresch a pneumatesch Systemer | Schneider |
| Wellelängt | 1090 Nm | Laserkraaft | 1000w/ 1500w/ 2000w |
| Gewiicht (kg) | 600 kg | Zertifizéierung | Ce, Iso9001 |
| Kärkomponenten | Glasfaserlaserquell, Glasfaser, Grëfflaser-Schweisskopf | Schlësselverkaafspunkten | Héich Genauegkeet |
| Funktioun | Metalldeeler Laserschweissen | Faserlängt | ≥10m |
| Uwendbar Industrien | Hotellen, Kleedergeschäfter, Baumaterialgeschäfter | Kärkomponenten | Laserquell |
| Operatiounsmodus | Gepulst | Service nom Garantie | Online-Ënnerstëtzung |
| Duerchmiesser vum Brennpunkt | 50μm | Maximal Ofdeckung | 1730mm |
| Video-Ausgangsinspektioun | Virgesinn | Ënnerstëtzte Grafikformat | AI, Plt, Dxf, Dwg, Dxp |
| Ursprungsplaz | Jinan, Shandong Provënz | Garantiezäit | 3 Joer |
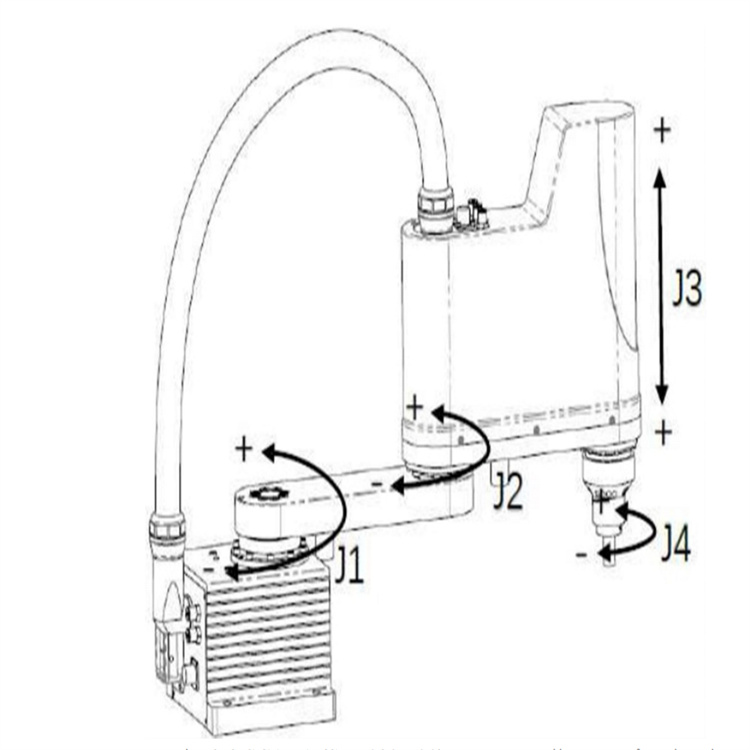
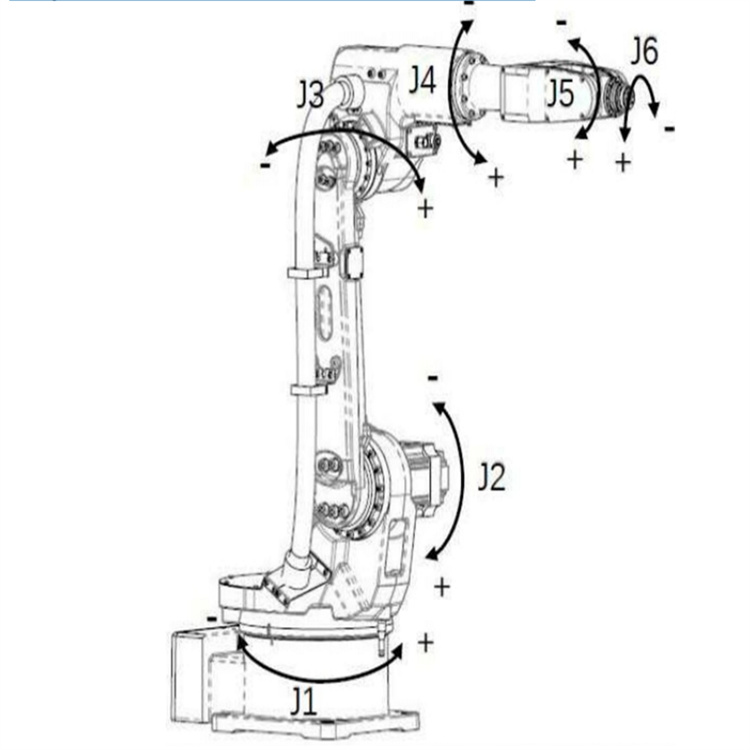
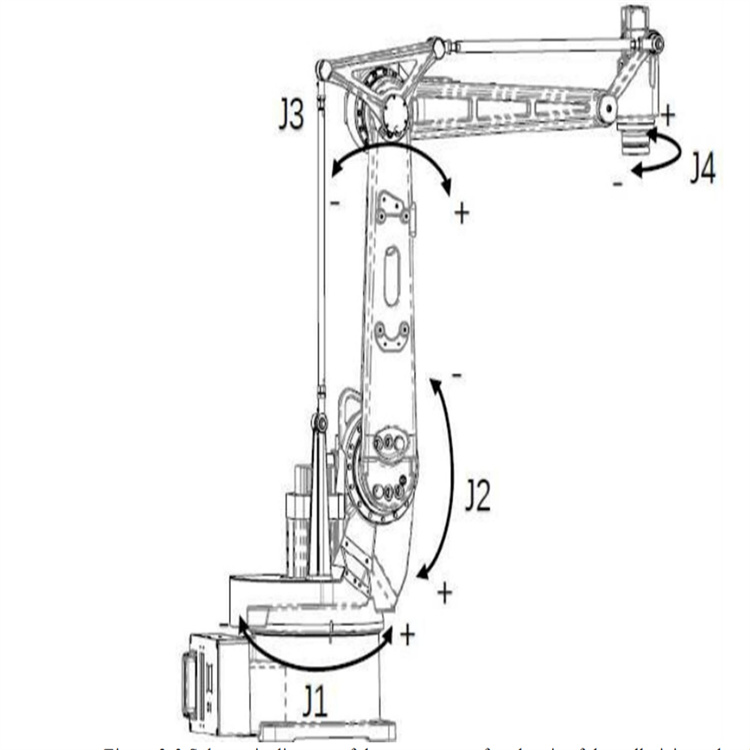
Roboterarm
D'Roboterachs kann eng Rotatiounsachs oder eng Translatiounsachs sinn, an de Betribsmodus vun der Achs gëtt vun der mechanescher Struktur bestëmmt. D'Roboterachs ass opgedeelt an d'Beweegungsachs vum Roboterkierper an d'äusser Achs. Déi äusser Achs ass opgedeelt an e Schiebetisch an e Positionéierer. Wann net anescht uginn, bezitt sech d'Roboterachs op d'Beweegungsachs vum Roboterkierper.
Turing-Roboter ginn an dräi Zorte vun Industrieroboter opgedeelt:
Industrielle sechsachsegen Roboter: inklusiv sechs Rotatiounsachsen
SCARA: enthält dräi Rotatiounsachsen an eng Translatiounsachs
Paletteniséierungsmanipulator: mat véier rotéierende Wellen D'Gelenkbewegung vum Roboter ass an der Figur gewisen.
Uwendung vun der Roboterschweissmaschinn
1. Maschinneproduktiounsfeld
Mat der Intensivéierung vun de Schweessaarbechten an der Maschinnebauindustrie huet de Schweessberuff inherent schlecht Aarbechtsbedingungen a grouss Hëtzestralung, wat e ganz geféierleche Beruff ass. Et gëtt och vill grouss Ausrüstung an der Maschinnebauindustrie, wat och d'Schwieregkeet vum Schweessen erhéicht. E Schweessroboter ass eng automatesch mechanesch Ausrüstung, déi sech mat Schweessaarbecht beschäftegt, wat d'Aarbechtsintensitéit vun den Aarbechter befreit an hëlleft den Niveau vun der Automatiséierung am Beräich vun der Maschinnebau ze verbesseren.
2. Automobil an Autodeeler:
An de leschte Joren huet d'Automobilindustrie sech diversifizéiert entwéckelt, fir den Ufuerderunge vun der Ëffentlechkeet gerecht ze ginn. Traditionellt Schweessen kann den héije Schweessufuerderunge vun der Automobil- an Autodeelerproduktioun net erfëllen. D'Schweessnaht ass schéin a fest. A ville modernen Automobilproduktiounsatelieren goufen Schweessroboter-Montagelinne gegrënnt.
3. Elektronesch Ausrüstung:
De Beräich vun den elektroneschen Ausrüstungen huet relativ héich Ufuerderungen un d'Schweissqualitéit. Mat der wuessender Nofro no elektroneschen Ausrüstung an der Gesellschaft, steet och elektronesch Ausrüstung viru schwéieren Erausfuerderungen, wärend se sech séier entwéckelen. Schweessroboter kënnen d'Schweissqualitéit stabiliséieren an dobäi d'Produktiounseffizienz garantéieren. D'präzis Schweessaarbecht vun der Ausrüstung ass dräi bis véier Mol méi héich wéi déi vun der manueller Aarbecht.
4. Loft- a Raumfaart:
An der Struktur vum Fliger ginn et bal 1.000 Schweesskomponenten vum Gehäuse, a bal 10.000 Deeler sinn dobäi involvéiert. Déi meescht vun de wichtege droende Komponenten vum Fliger benotzen geschweesste Komponenten. De Gehäuse vum Fliger steet wärend dem Fluch ënner groussen Drock, dofir sinn d'Ufuerderunge fir d'Schweessen relativ streng, an de Schweessroboter kann d'Schweessparameter flexibel duerch déi automatesch Schweessnahtverfolgungstechnologie astellen, fir d'Fligerstruktur präzis ze schweessen.
Ënnerhalt vun der Maschinn
- Drotzufuhrmechanismus. Dorënner ob d'Drotzufuhrdistanz normal ass, ob de Drotzufuhrleitung beschiedegt ass, an ob et en anormalen Alarm gëtt; ob de Gasfloss normal ass; ob de Sécherheetssystem vum Schweessbrenner normal ass. (Et ass verbueden de Schweessbrenner fir Sécherheetsaarbechten zouzemaachen); ob de Waasserzirkulatiounssystem normal funktionéiert; Test vum TCP (et ass recommandéiert en Testprogramm ze kompiléieren an no all Schicht auszeféieren)
2. Wëchentlech Inspektioun an Ënnerhalt
1. All Achs vum Roboter schrubben; d'Genauegkeet vum TCP kontrolléieren; den Uelegstand am Rescht kontrolléieren. ;Kontrolléieren, ob d'Nullpositioun vun all Achs vum Roboter korrekt ass; de Filter hannert dem Waassertank vum Schweessapparat botzen.; de Filter um Drockloftanlaaf botzen; d'Onreinheeten un der Düse vum Schweessbrenner botzen, fir eng Verstoppung vum Waasserzirkulatioun ze vermeiden; den Drotzufuhrmechanismus botzen, inklusiv Drotzufuhrrad, Drotdréckrad an Drotféierungsrouer; kontrolléieren, ob de Schlauchbündel an de Féierungsdrotschlauch beschiedegt oder gebrach sinn. (Et ass recommandéiert, de ganze Schlauchbündel ze entfernen a mat Drockloft ze botzen); kontrolléieren, ob de Sécherheetssystem vum Schweessbrenner normal ass an ob den externen Noutstoppknäppchen normal ass.